
-
-
定位系统平台

-
监测系统平台

-
定位系统平台
安全帽定位精度测试报告
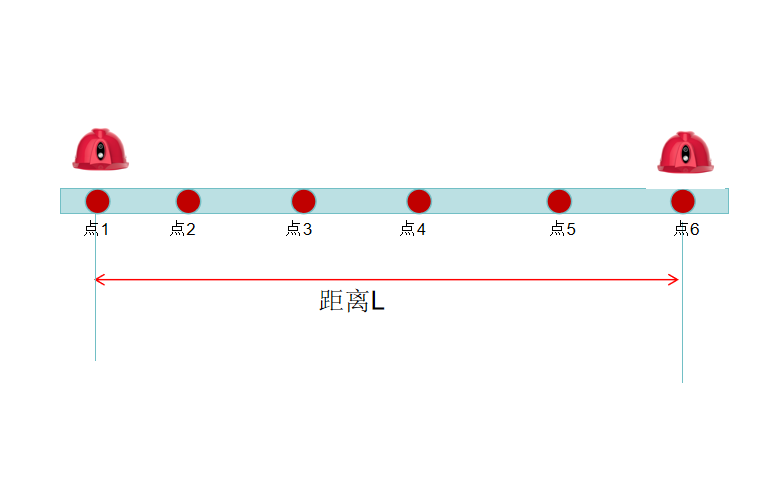
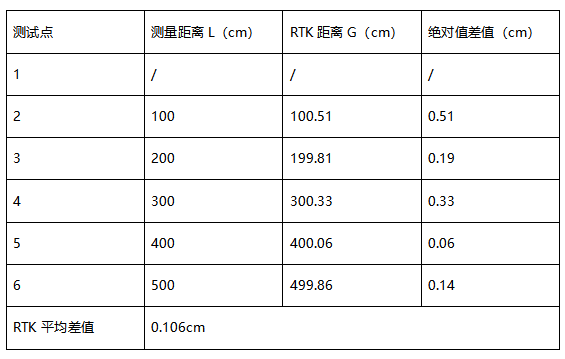
1:水平定位精度测试,测试方法如下
将安全帽依次放在水平地面上不同位置的1,2,3,4,5,6个位置,然后用卷尺测量出1点到2,3,4,5,6点的距离,同时记录安全帽放在各个点位置上的经纬度坐标,用1点和其他点位经纬度计算距离和卷尺测量出来的距离做比较,从而计算安全帽自身的定位精度。
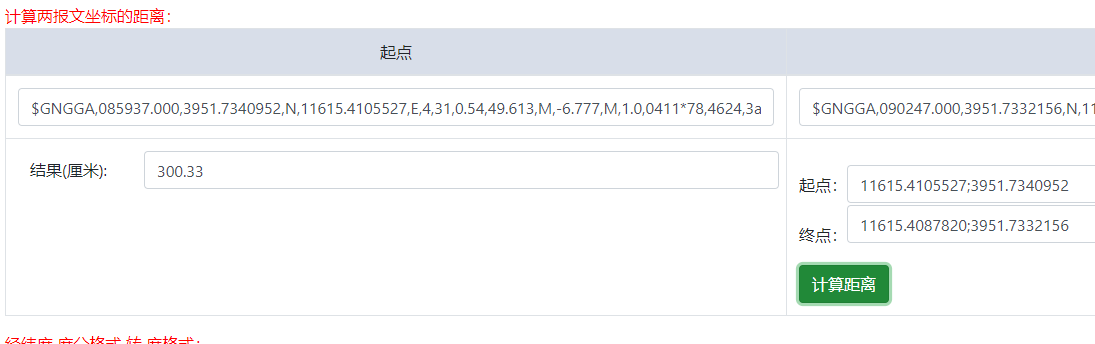
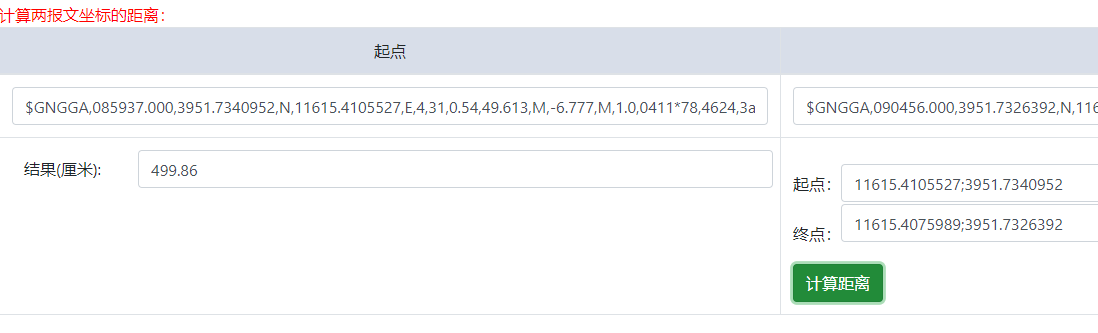
1点经纬度原始坐标如下:$GNGGA,085937.000,3951.7340952,N,11615.4105527,E,4,31,0.54,49.613,M,-6.777,M,1.0,0411*78,4624,3a,0,0,42,0


2点经纬度原始坐标如下:
$GNGGA,090048.000,3951.7338038,N,11615.4099576,E,4,31,0.54,49.604,M,-6.777,M,1.0,0411*71,4624,3a,0,0,42,0

1点2点的测量距离为100.51厘米

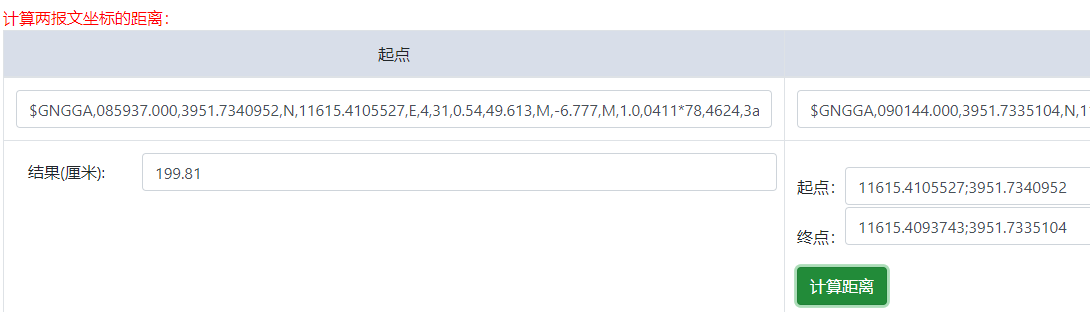
3点经纬度原始坐标如下:
$GNGGA,090144.000,3951.7335104,N,11615.4093743,E,4,31,0.54,49.590,M,-6.777,M,1.0,0411*7F,4624,3a,0,0,42,0

1点3点的测量距离为199.81厘米
4点经纬度原始坐标如下:
$GNGGA,090247.000,3951.7332156,N,11615.4087820,E,4,31,0.54,49.603,M,-6.777,M,1.0,0411*79,4624,3a,0,0,42,0

1点4点的测量距离为300.33厘米
5点经纬度原始坐标如下:
$GNGGA,090354.000,3951.7329299,N,11615.4081887,E,4,31,0.54,49.605,M,-6.778,M,1.0,0411*72,4624,3a,0,0,42,0

1点5点的测量距离为400.06厘米

6点经纬度原始坐标如下:
$GNGGA,090456.000,3951.7326392,N,11615.4075989,E,4,31,0.54,49.603,M,-6.777,M,1.0,0411*7F,4624,3a,0,0,42,0

1点5点的测量距离为499.86厘米
测量结果如下
2:高程精度测量方法如下
将安全帽依次放在垂直地面上不同位置的1,2,3,4,5,6个位置,然后用卷尺测量出1点到2,3,4,5,6点的距离,同时记录安全帽放在各个点位置上的经纬度坐标,用1点和其他点位经纬度计算距离和卷尺测量出来的距离做比较,从而计算安全帽自身的定位精度。

测试过程记录
1点的经纬度原始值为,海拔高为49.333米
$GNGGA,091602.000,3951.7340333,N,11615.4096639,E,4,31,0.57,49.333,M,-6.777,M,1.0,0411*7A,4624,3a,0,0,42,0

2点的经纬度原始值为,海拔高为49.612米
$GNGGA,091523.000,3951.7338691,N,11615.4096862,E,4,31,0.57,49.612,M,-6.777,M,1.0,0411*7E,4624,3a,0,0,42,0

3点的经纬度原始值为,海拔高为50.432米
$GNGGA,091401.000,3951.7338865,N,11615.4092480,E,4,31,0.57, 50.432,M,-6.777,M,1.0,0411*74,4624,3a,0,0,42,0

4点的经纬度原始值为,海拔高为50.623米
$GNGGA,091313.000,3951.7338852,N,11615.4092562,E,4,31,0.57, 50.623,M,-6.777,M,1.0,0411*75,4624,3a,0,0,42,0

5点的经纬度原始值为,海拔高为51.037米
$GNGGA,091703.000,3951.7338853,N,11615.4092600,E,4,31,0.57,51.037,M,-6.777,M,1.0,0411*74,4624,3a,0,0,42,0

6点的经纬度原始值为,海拔高为,51.216米
$GNGGA,091806.000,3951.7338813,N,11615.4092480,E,4,31,0.57,51.216,M,-6.777,M,1.0,0411*72,4624,3a,0,0,42,0

测试结果如下


-

化工、石化、炼油厂人员及车辆定位方案
化工生产环境复杂多变,厂区内广泛分布着易燃易爆、有毒有害、高温高压等高风险区域,一旦发生泄漏、火灾、爆炸或中毒等事故,极易造成重大人员伤亡。事故发生后,企业能否第一时间准确掌握现场人员分布情况,直接影响疏散组织与应急救援的效率,关乎每一位员工的生命安全。
-

行车、天车防碰撞方案
通过在行车上安装精准测距基站,基站之间实时互相测距,设定一个危险距离R,当行车2和行车1或者行车3的距离小于R时,就会触发继电器工作启动声光报警器提醒司机或者切断电源让天车停止工作。
-

矿山人员车辆定位管理解决方案
矿山人员车辆定位方案是一种设计用于跟踪矿区内运载矿山人员的车辆位置的系统。 该系统通过提供车辆的实时位置信息,对于确保人员安全至关重要。 以下是矿山人员车辆定位方案的一些关键组成部分:GPS跟踪:该方案利用GPS(全球定位系统)跟踪矿山人员车辆的位置。 GPS 跟踪提供准确的位置数据,可用于监控车辆的速度和方向。车辆跟踪软件:从车辆收集的 GPS 数据被发送到中央系统,该系统使用车辆跟踪软件在地图上显示车辆的实时位置。通讯设备:该方案还需要无线电或手机等通讯设备,让车上人员能够与控制室和应急服务部门进行通讯。地理围栏:地理围栏是一项允许该方案在矿区内设置虚拟边界的功能。 如果车辆进入或离开地理围栏区域,该方案将向控制室发出警报。应急响应:该方案应制定应急响应协议,以防发生事故。 这可能涉及应急小组、疏散计划和急救设备。总体而言,矿山人员车辆定位方案是矿山安全的重要组成部分。 通过提供实时位置数据,该方案可以帮助预防事故并对紧急情况做出快速反应。
-
叉车防碰撞方案
车与人防碰撞:叉车上安装精准测距模块和声光报警器,预先设定好安全距离R,测距模块与人员携带的标签测距L,当距离小于预先设定的安全距离R时就触发测距模块的继电器接通声光报警器工作提醒驾驶员注意。
-

工业智能制造,电力电厂,钢铁治金定位方案
高精度人员、物资、车辆精准定位系统基于多维技术融合方案,可以实现10~30厘米的精准位置数据采集,可用于工业智能智能制,造汽车装配,电力电厂,钢铁治金等行业实现对工厂内的人、车、物、料等的精确定位、无缝追踪、智能调配与高效协同,大幅提升工厂的精益生产及精细化管理水平。
-
数据机房人员定位方案
通过在机房内布设有限数量微基站,实时精确地定位巡检人员上的微标签位置,零延时地将巡检人员位置信息显示在机房控制中心,进行安全区域管控、人员在岗监控等。精度达到10厘米级,精确管控以优化流程、合理调度安排、提高数据机房的巡检效率。
-
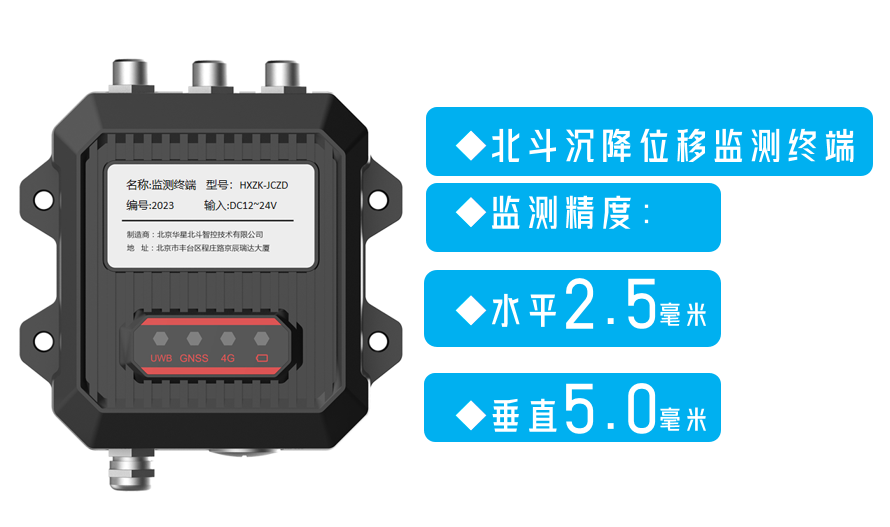
北斗储油罐、滑坡、采空区位移变形监测方案
北斗位移监测可实现水平±2.5毫米,垂直±5.0毫米的位置变化监测,可以用于滑坡,道路边坡,采空区,尾矿库,水库大坝,铁塔,储油罐等的形变监测,通过长期的连续监测,掌握被监测体的位置变化趋势,避免灾害事故发生。
-
隧道错车智慧调度方案
铁路隧道施工过程中,由于隧道宽度比较窄,只在固定的距离处有错车位置,当车辆交汇位置距离错车位置比较远的时候车辆需要倒车到错车位置才能错车,这就会导致花费很多时间来错车,大大的降低了工作效率。
-
智慧电厂定位方案
火力发电厂安全管理的主要环节就是全过程生产管理中对运行、检修、维护和技术改造环节的安全管理。 火力发电厂安全管理的主要任务是要保证人身安全、设备安全和运行安全。现场安全管理主要是结合生产实际,根据运行检修情况所进行的安全管理活动。在现场生产中,运行维护、定期试验、设备消缺、运行与检修设备系统是否隔绝,安全措施是否完善。
-

戒毒所人员定位
室内定位系统中,人员或物品上所佩戴的定位标签利用超宽带脉冲信号发射出位置数据,定位基站接收,计算出定位标签信号到达不同定位基站的时间差,然后处理软件对位置进行解算,最终得到被定位物体的位置(如下图所示)。
-

景区游览车高精度定位管理方案
景区里电动游览车越来越多,车辆穿梭在狭窄的道路、人流密集的区域,容易出现超速、闯入禁行区(如步行街、草坪)、越界行驶等安全问题。传统GPS定位误差大(5-10米),分不清车辆到底在哪条车道、是否越线,监控画面经常出现“漂移”,给调度和安全监管带来很大困扰。
-

变电站定位
变电站具有很强的电磁干扰,这会对精确定位系统的位置信息采集造成极大的影响,导致传统的定位系统难以达到“精确定位”目的。华星智控采用超宽带(UWB)定位技术,该技术由于极低的射频功率,能够有效对抗多径,提高在复杂电磁波环境下的定位精度;超宽带信号有很强的穿透能力,非常适合阻挡物较多的变电站环境定位;超宽带定位精度可达厘米级,同时对定位基站及标签采取相应的屏蔽措施,确保精确定位系统在复杂电磁环境下的可靠运行。














