
-
-
定位系统平台

-
监测系统平台

-
定位系统平台
差分基准站的安装
基准站的建站环境应满足观测环境要求和依托保障要求,具体如下:
(1)观测环境要求
1)距易产生多路径效应的地物(如高大建筑、树木、水体、海滩和易积水地带等)的距离应大于200m。
2)应有10°以上地平高度角的卫星通视条件,困难环境条件下,高度角可放宽至25°,遮挡物水平投影范围应低于60°。
3)距微波站和微波通道、无线电发射台、高压线穿越地带等电磁干扰区距离应大于200m。
4)避开采矿区、铁路、公路等易产生振动的地带。
5)应顾及未来的规划和建设,选择周围环境变化较小的区域进行建设。
6)应进行连续24h以上的实地环境测试,对于国家基准站和区域基准站,数据可用率应大于85%,多路径影响小于0.5m;对于专业应用站网基准站,可按实际情况执行。
(2)依托保障要求
1)便于接入公共或专用通信网络;
2)具有稳定、安全可靠的电源;
3)交通便利,便于人员往来和车辆运输;
4)具有良好的土建施工条件;
5)具有建设用地及基本设施保障;
6)具有良好的安全保障环境,便于人员维护和站点的长期保存。
(3)选址规划
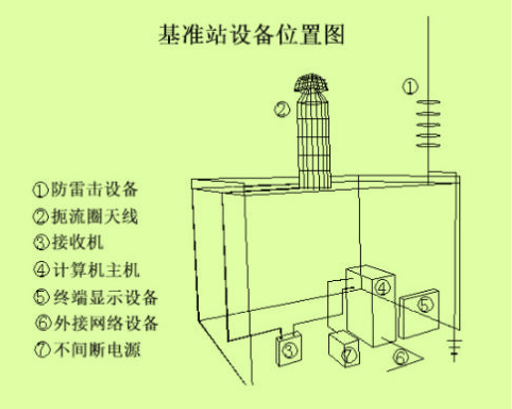
基准站主体有两部分组成,分别为观测墩和北斗接收机设备。观测墩建于室外,用于全天候GNSS卫星的观测,接收机一般放于室内,用于处理卫星信号生成观测数据并通过网络传输给服务器。接收机与观测墩之间通过馈线连接,结构如下图 。
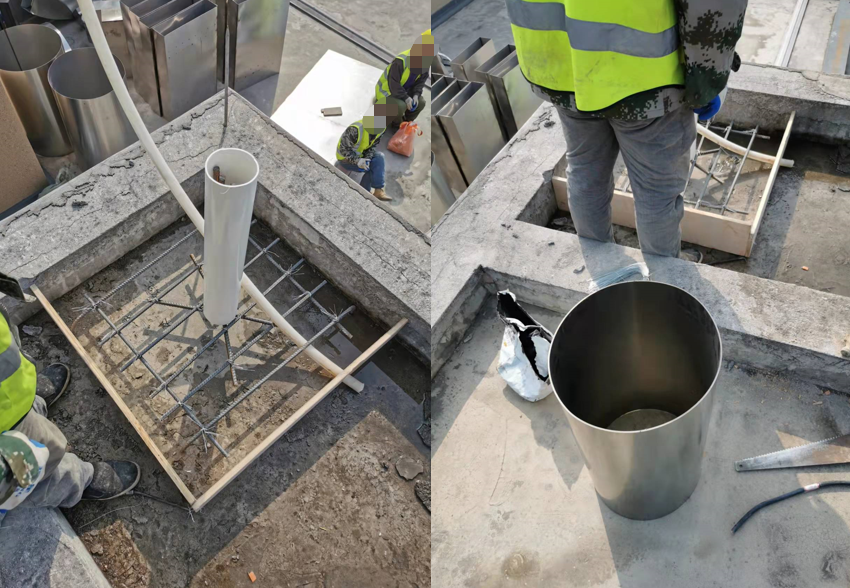
(4)基准站室外部分
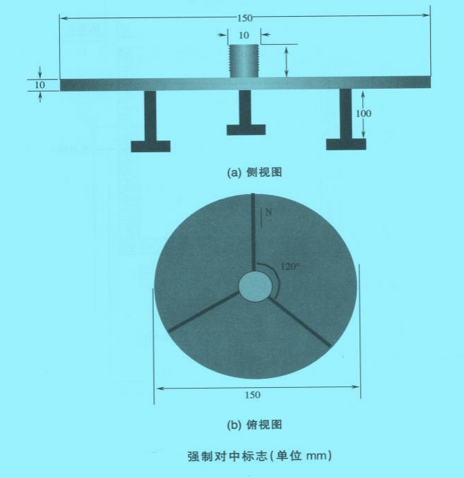
本项目观测墩建设位于建筑物屋顶,主要分为GNSS天线和GNSS观测墩两部分。屋顶观测墩的高度应大于0.8m,混泥土浇筑 内部钢筋与房屋主承重结构钢筋焊接(删除) ,结合部分应不少于0.1m。观测墩上安装强制对中标志,并严格整平。墩外壁设置钢或塑料的硬质线缆管道。
观测室应满足仪器设备正常运行的要求,分别设置电力和信号管线通道,并考虑防水、防风、防雷和动物防护等因素。
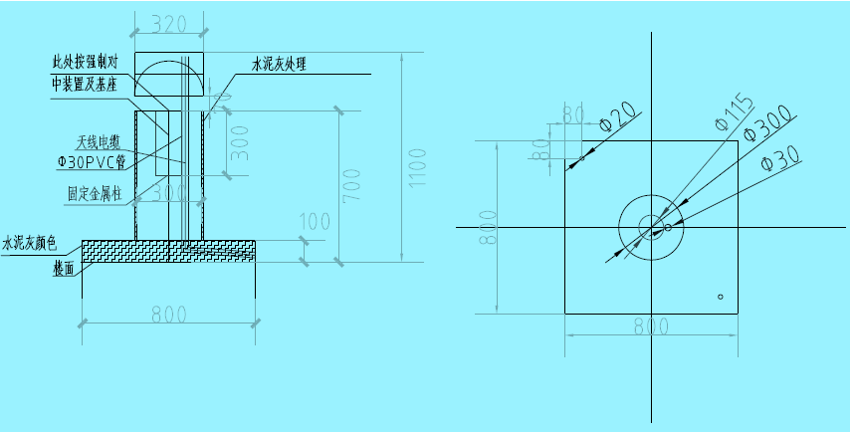
(5)屋顶观测墩的规格及用料
(1)观测墩建设为柱体,外设计直径为300mm的不锈钢水泥灰色调柱,内使用设计直径为115mmPVC浇筑混泥土;中间层用保温材料填充;系统设计的观测柱含底座和天线为总高度约为1100mm。
(2)观测墩底座浇筑尺寸为:800mm*800mm*100mm。
(3)用于安装线缆的管道平行于观测墩纵轴,平面位于纵轴圆心和观测墩边缘之间的中心位置。管道由最上面平台至地下传出,从顶上向下设一分管道,通至观测墩外壁。
(4)柱石钢筋Φ=10mm,裹筋Φ=8mm,竖向钢筋两端应有弯头。观测墩用8(横向4+纵向4)根钢筋与圆形柱石用4根钢筋捆扎。
(5)采用的水泥标号不应低于32.5。
(6)石子采用5-40 mm的天然卵石或坚硬碎石。
(7)沙子采用0.15-3 mm粒径的中砂,含泥量不得超过3%。
(8)水须采用清洁淡水,硫酸盐含量不得超过1%。
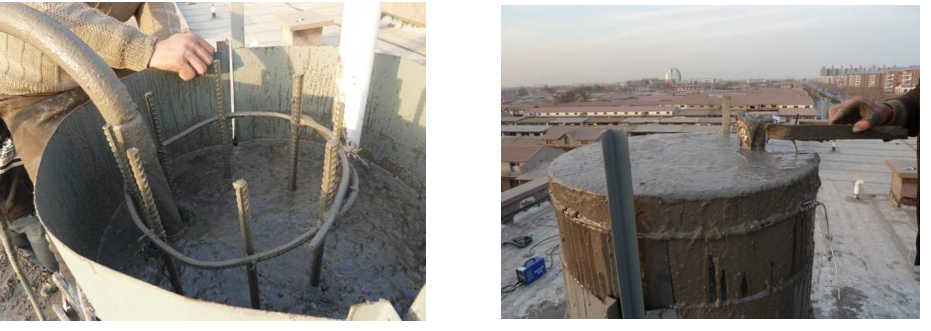
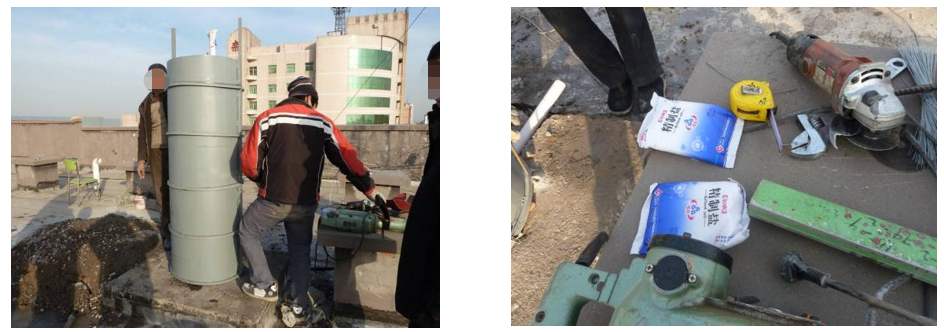
(6)施工内容及要求
(1)观测墩建设除按上述条款建立基础和柱石外,安装设备安放柜和通往控制间的线缆管。
(2)所有地基开挖和水泥浇筑等各施工环节均须采用数字相机拍摄资料照片,分辩率不低于300万相素。
(3)钢筋捆扎和用料要求详细按《中国地壳运动观测技术规程》要求执行。
(4)拆模时间不得少于12小时。





-
化工、石化、炼油厂人员及车辆定位方案
化工厂人员、车辆定位管理系统具有如下的特点:华星智控化工厂人员定位管理系统融合LORA、4G/5G通信技术,基于自研的室内外高精度定位物联网算法,实现对化工厂人员、车辆的实时精确定位,系统具有高精度,免布线,高实时性,高可靠稳定性的核心优势特点。
-

行车、天车防碰撞方案
通过在行车上安装精准测距基站,基站之间实时互相测距,设定一个危险距离R,当行车2和行车1或者行车3的距离小于R时,就会触发继电器工作启动声光报警器提醒司机或者切断电源让天车停止工作。
-

矿山人员车辆定位管理解决方案
矿山人员车辆定位方案是一种设计用于跟踪矿区内运载矿山人员的车辆位置的系统。 该系统通过提供车辆的实时位置信息,对于确保人员安全至关重要。 以下是矿山人员车辆定位方案的一些关键组成部分:GPS跟踪:该方案利用GPS(全球定位系统)跟踪矿山人员车辆的位置。 GPS 跟踪提供准确的位置数据,可用于监控车辆的速度和方向。车辆跟踪软件:从车辆收集的 GPS 数据被发送到中央系统,该系统使用车辆跟踪软件在地图上显示车辆的实时位置。通讯设备:该方案还需要无线电或手机等通讯设备,让车上人员能够与控制室和应急服务部门进行通讯。地理围栏:地理围栏是一项允许该方案在矿区内设置虚拟边界的功能。 如果车辆进入或离开地理围栏区域,该方案将向控制室发出警报。应急响应:该方案应制定应急响应协议,以防发生事故。 这可能涉及应急小组、疏散计划和急救设备。总体而言,矿山人员车辆定位方案是矿山安全的重要组成部分。 通过提供实时位置数据,该方案可以帮助预防事故并对紧急情况做出快速反应。
-
叉车防碰撞方案
车与人防碰撞:叉车上安装精准测距模块和声光报警器,预先设定好安全距离R,测距模块与人员携带的标签测距L,当距离小于预先设定的安全距离R时就触发测距模块的继电器接通声光报警器工作提醒驾驶员注意。
-

工业智能制造,电力电厂,钢铁治金定位方案
高精度人员、物资、车辆精准定位系统基于多维技术融合方案,可以实现10~30厘米的精准位置数据采集,可用于工业智能智能制,造汽车装配,电力电厂,钢铁治金等行业实现对工厂内的人、车、物、料等的精确定位、无缝追踪、智能调配与高效协同,大幅提升工厂的精益生产及精细化管理水平。
-
数据机房人员定位方案
通过在机房内布设有限数量微基站,实时精确地定位巡检人员上的微标签位置,零延时地将巡检人员位置信息显示在机房控制中心,进行安全区域管控、人员在岗监控等。精度达到10厘米级,精确管控以优化流程、合理调度安排、提高数据机房的巡检效率。
-
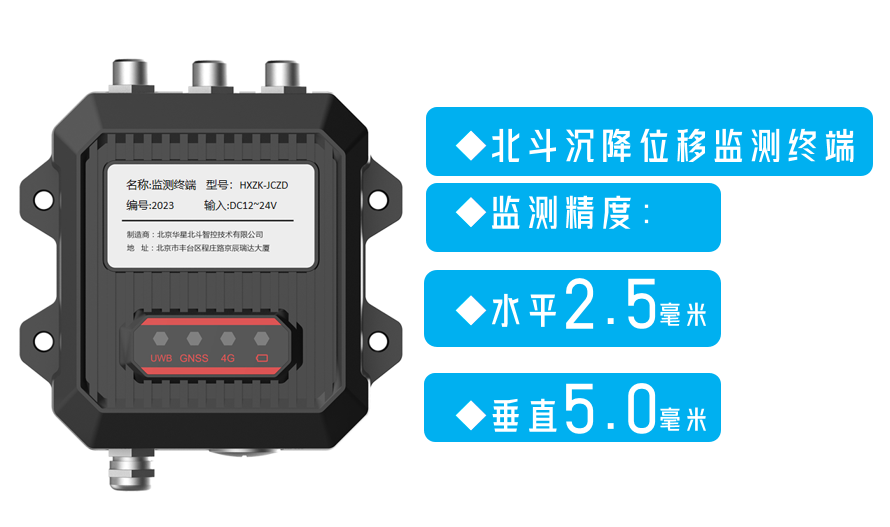
北斗储油罐、滑坡、采空区位移变形监测方案
北斗位移监测可实现水平±2.5毫米,垂直±5.0毫米的位置变化监测,可以用于滑坡,道路边坡,采空区,尾矿库,水库大坝,铁塔,储油罐等的形变监测,通过长期的连续监测,掌握被监测体的位置变化趋势,避免灾害事故发生。
-
隧道错车智慧调度方案
铁路隧道施工过程中,由于隧道宽度比较窄,只在固定的距离处有错车位置,当车辆交汇位置距离错车位置比较远的时候车辆需要倒车到错车位置才能错车,这就会导致花费很多时间来错车,大大的降低了工作效率。










